

















Colleges and Universities
Explore STEM Resources for Colleges, Universities, and Technical and Vocational Institutions.
Act Now!
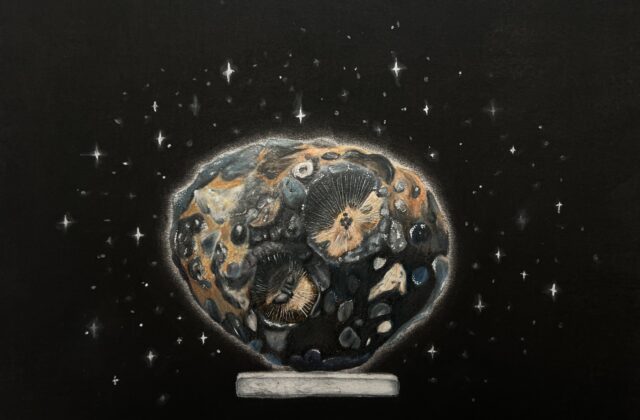
NASA Psyche Inspired Online Art Showcase
You're invited to an online showcase of artwork created by 16 undergraduate Psyche Inspired interns from around the U.S. View the creative ways they are sharing the science, engineering, technology, and teamwork of NASA's Psyche mission. Event Date: April 16-26

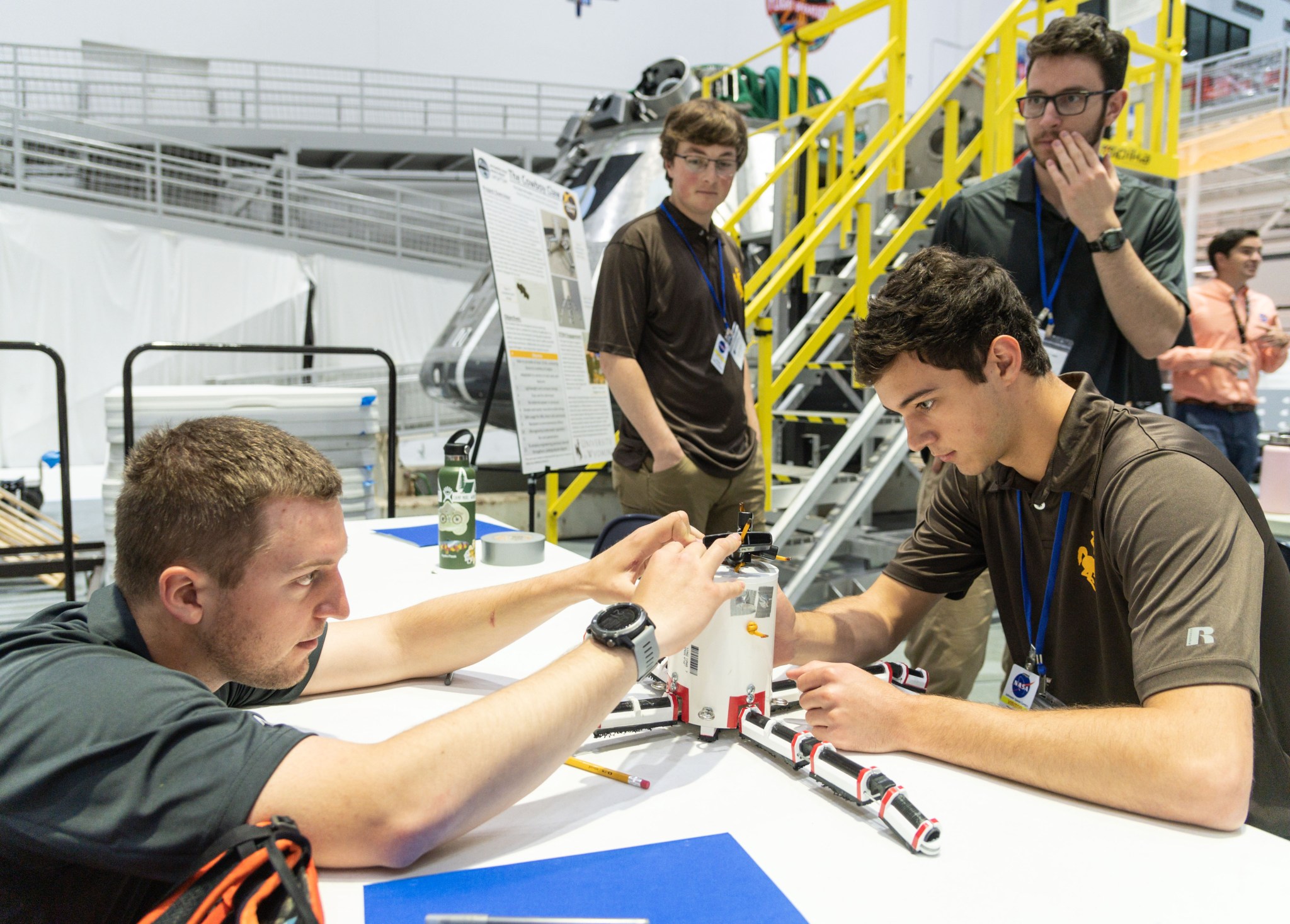
2025 Moon to Mars eXploration Systems and Habitation Academic Innovation Challenge
In collaboration with the National Space Grant Foundation, NASA is challenging university teams to develop innovative design ideas related to space habitats and deep space exploration missions. Challenge teams take part in real-world, hands-on design, research, and development opportunities. Proposal Deadline: April 26
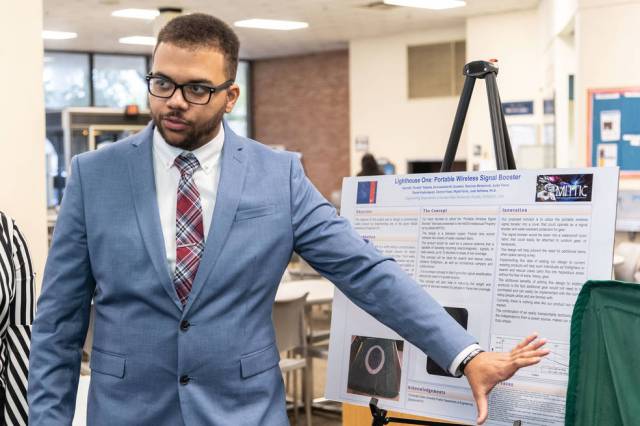
Spring 2024 NASA MITTIC Competition
Congratulations to the top teams in the Spring 2024 NASA Minority University Research and Education Project (MUREP) Innovation and Technology Transfer Idea Competition (MITTIC). Watch the 11 teams pitch their ideas via livestream. Event Date: April 26

NASA Advanced Air Vehicles Program (AAVP) Fellowship Opportunities
NASA’s Aeronautics Research Mission Directorate is seeking proposals from accredited U.S. institutions for research training grants to begin the academic year. This opportunity is designed to support independently conceived research projects by highly qualified graduate students, in disciplines needed to help advance NASA’s mission, thus affording these students the opportunity to directly contribute to advancements in STEM-related areas of study. AAVP fellowship opportunities are focused on innovation and the generation of measurable research results that contribute to NASA’s current and future science and technology goals. Application Deadline: April 30
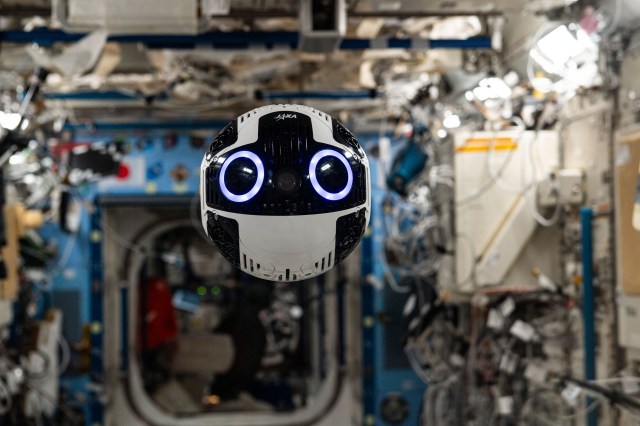
2024 Kibo Robot Programming Challenge – Call for U.S. Teams
The Kibo Robot Programming Challenge invites teams of students from around the world to create programs to move free-flying robots known as Astrobees on the International Space Station. The competition presents tasks/obstacles for students to solve using the space station’s Kibo module as a game space. Registration Deadline: May 13

Shape the Future of Space Technology With NASA
NASA’s Space Technology Mission Directorate (STMD) is refining its strategy for prioritizing technology investments, evolving into a stronger and more resilient national tech base for civil space. STMD’s new annual process gathers feedback from the American aerospace community about their most pressing shortfalls, or identified technology areas requiring further development to meet future exploration, science, and other mission needs. Feedback Submission Deadline: May 13
Contact Opportunity: Amateur Radio on the International Space Station
ARISS-US is accepting proposals from U.S. schools, museums, and community youth organizations (working individually or together) to host an amateur radio contact with an astronaut aboard the International Space Station between Jan. 1 and June 30, 2025. Proposal Deadline: May 19
Call for Proposals: NASA's Aeronautics Research Mission Directorate's University Leadership Initiative
The University Leadership Initiative provides the opportunity for university teams to exercise leadership in proposing technical challenges, defining multidisciplinary solutions, establishing peer review mechanisms, and applying innovative strategies to strengthen research impact. Proposal Deadline: May 29

NASA Community College Aerospace Scholars –<br>Mission 1: Discover
NASA Community College Aerospace Scholars (NCAS) supports community college students seeking to transfer to a four-year institution or go directly to the labor force by engaging them in authentic learning experiences. Applications for Mission 1: Discover are open now. Participants will take part in a five-week, self-paced online course introducing scholars to NASA missions and research. Application Deadline: June 10

NASA International Space Apps Challenge Seeks Local Leads for 2024 Hackathon
The NASA International Space Apps Challenge is in search of Local Leads for the 2024 hackathon taking place in October. Local Leads work alongside NASA and the Space Apps Global Organizing Team to organize the Space Apps Challenge for a specific city or town. This includes planning a virtual or in-person local event, supporting local participants, and coordinating local collaborators, judges, and community members. Application Deadline: June 15

NASA's Open Science 101 Curriculum
Sign up for a 5-module curriculum designed to equip researchers, students and citizen scientists with the knowledge and skills to navigate the principles and practices of open science, including developing an open science and data management plan. Expand your Open Science expertise and equip yourself with the essential skills required to excel in the realm of open science. Sign up today to embark on your journey towards advancing your open science proficiency and gain your NASA Open Science Certification.
April is Citizen Science Month
Join the celebration by collecting data, analyzing results, and helping scientists solve real-world problems.
Learn More about April is Citizen Science Month
Be a NASA Intern
NASA Office of STEM Engagement paid internships allow high school and college-level students to contribute to agency projects under the guidance of a NASA mentor.
Apply Now
NASA STEM Engagement Funding Opportunities



MSI Exchange
The Minority Serving Institutions Exchange (MSI) is a tool that supports your search for innovative and diverse academic collaborators by curating STEM offerings and capability statements of MSIs nationwide. The MSI Exchange can inform partnerships for teaming opportunities and competitive federal awards such as contracts, cooperative agreements, and grants.
Learn More about MSI Exchange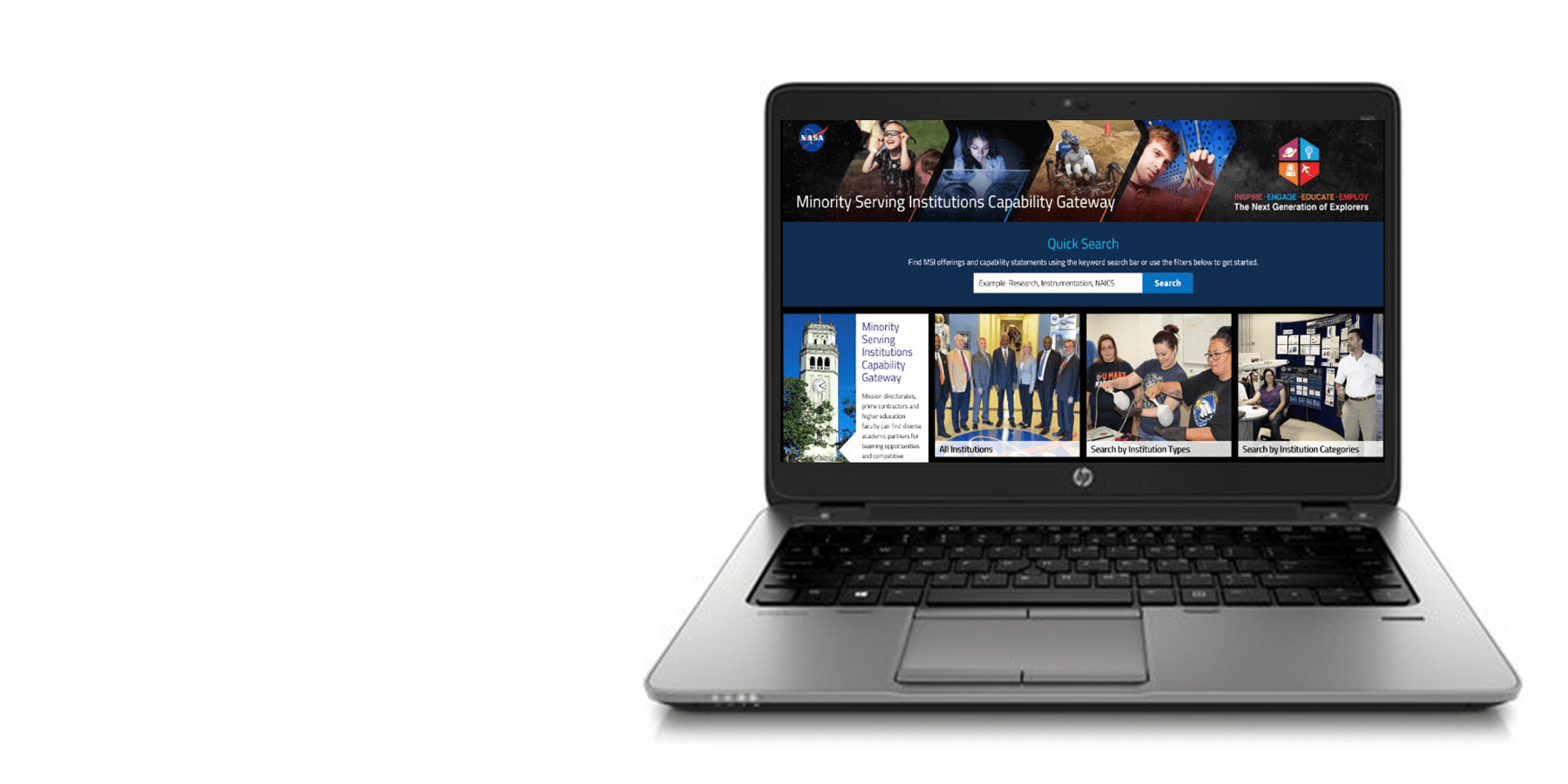
NASA STEM Opportunities and Activities For Students
Multiple challenges and opportunities reaching a broad audience of middle and high schools, colleges, and universities across the nation.

RMC: Lunabotics Competition
This is a university-level competition for teams to use the NASA Systems Engineering Process to design, build, and operate a Lunar robot.

NASA Student Launch Challenge
Student Launch is a research-based, competitive, experiential exploration activity. This project offers multiple challenges reaching a broad audience of middle and high schools, colleges, and universities across the nation.

First Nations Launch
This competition is an opportunity for students attending a Tribal College or University, a Native American-Serving Nontribal Institution, or who are members of an active American Indian Science and Engineering Society collegiate chapter to design, build, and fly a high-powered rocket.
Explore Careers at NASA
Interested in working at NASA? Start now to be part of NASA’s future. Visit the Careers page to learn more about exciting opportunities at NASA.
Learn More about Explore Careers at NASA
NASA's Impact on Our Lives
NASA’s Technology Transfer program ensures that technologies developed for missions in exploration and discovery are broadly available to the public, maximizing the benefit to the nation. From eco-friendly food alternatives to precision eye surgery, the list of NASA spinoffs goes on for lightyears!
Learn More
Get Your Research On The Station
Reference information and resources to provide insight into sending your science experiment or technology demonstration to the space station.
Conducting research on the ISS National Laboratory demonstrates to U.S. citizens and the world that space is accessible, affordable, and capable of supporting the research and development necessary to make the fundamental business case for sustainable industrial demand in low Earth orbit.
Learn More
Research Opportunities for Professionals
Find Opportunities for Funding and More
Supporting research in science and technology is an important part of NASA’s overall mission.
Learn More
Science Activation
NASA Science Events and Activities
Let NASA’s Science Activation program bring the universe to you! We’re inviting every student, educator, and lifelong learner to share in the excitement of scientific discovery and space exploration through these unique opportunities. Science Activation reaches learners in all 50 states and more than 110 countries around the world.
Learn More
Citizen Science
NASA’s citizen science projects are collaborations between scientists and interested members of the public.
Through these collaborations, volunteers (known as citizen scientists) have helped make thousands of important scientific discoveries. More than 410 NASA citizen scientists have been named as co-authors on refereed scientific publications. NASA citizen science projects are open to everyone around the world, not limited to U.S. citizens or residents.
Learn More
NASA+
Now Available: NASA+, a new ad-free, no-cost, family-friendly streaming service that embeds you into our missions through new original video series.
Start Exploring NASA+ about NASA+
Get Social With NASA

NASA Podcast on Spotify
From interviews with astronauts to narrative shows that take you on a tour of the galaxy, NASA podcast let you experience the thrill of space exploration without leaving Earth.
Social Media at NASA

NASA Podcasts

Be NASA's Virtual Guest!
NASA e-books
NASA Blogs
Join the Artemis Mission to the Moon
Make, launch, teach, compete and learn. Find your favorite way to be part of the Artemis mission.
Go to the Website about Join the Artemis Mission to the Moon